
Can a robotic hand like that of Optimus or that of 1x get to feel like ours? Researchers at the University of Cambridge and the University College London believe they have taken an important step in that direction. They have developed one Artificial skin Composed of a single flexible material, capable of detecting temperature, pressure, cuts and multiple simultaneous touches. All without rigid layers or sensors distributed inside. And the most promising, according to its creators, is that it can adapt to complex forms and promises a relatively simple manufacturing process: it is enough to melt it, pour it into a silicone mold, remove the internal positive and place it as a glove on a robotic structure, as shown in This demonstrative video.
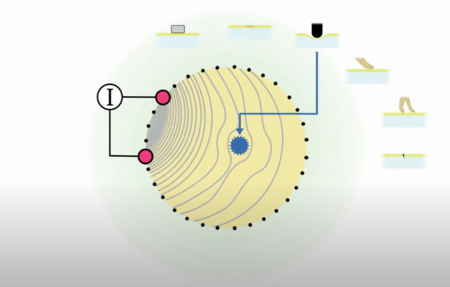
The nucleus of this technology is a driver hydrogel that, when combined with electric impedance (EIT) tomography, allows you to continuously register what happens on its surface. When a stimulus occurs – contract, heat or pressure – the fields are altered. The system detects not only the type of stimulus, but also its location and environmental conditions. All this is interpreted through automatic learning, with latencies that depend on the number of active channels, explain in the article published in Science Robotics.
A soft membrane, millions of data
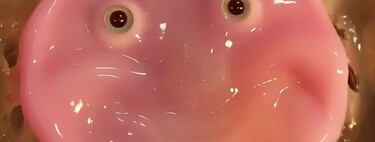
The best example of the system is a robotic hand of real size, hollow inside, fully covered with this artificial skin. Instead of distributed sensors, use exclusively 32 electrodes placed on the wrist. This configuration was sufficient to extract more than 1.7 million information channels, derived from 863,040 different combinations.
During the tests, the hand was exposed to different stimuli: a human finger, a thermal probe, the impact of a scalpel. In all cases it was able to distinguish the type of interaction and locate it with an average precision of about 25 millimeters above its entire surface. The interesting thing is that a sensor is not necessary for each type of stimulus. The membrane itself reacts differently depending on the intensity or nature of the contact, and it is the model of the one that identifies the most relevant signal between hundreds of thousands of possibilities.

In addition to touch, this skin is able to monitor the environment. During a 100 -hour test, the system registered variations between 19 and 25 ° C and between 38 and 72% relative humidity, as details The official note of the University of Cambridge. All this with a design without rigid components, which facilitates its integration into Prosthesis, technical clothing, control surfaces or collaborative robots. Applications ranging from rehabilitation and remote exploration to the automobile sector.
Of course, this development does not start from zero. In recent years we have seen other proposals that seek to endow robot sensitivity, such as This synthetic skin capable of replicating pain, This other that presumes to approach human skin as never beforeeither A capable of self -backing and recycling. What distinguishes the work of Cambridge and UCL is its radically simplified approach: a single flexible layer, without mechanical components, which centralizes all sensitivity and interprets it by software.
Challenges remain in front: improve the resolution in areas far from the electrodes, reinforce the resistance of the long -term hydrogel. But paradigm shift seems to be underway. Everything indicates that it is a matter of time until we see robots not only more advanced in mobility and interaction, but also closer to us in appearance and physical sensitivity. An artificial skin like this opens the door to a new generation of machines that not only execute tasks, but also “feel” the surrounding environment. Even so, we are far from reaching the level of realism that proposes’Detroit: Become Human‘.
Images | Cambridge University (1, 2, 3) | Quantic Dream
{kind=link}
{kind=link}
GIPHY App Key not set. Please check settings